{kind=link}
Original file (933 × 562 pixels, file size: 116 KB, MIME type: image/png)
Summary
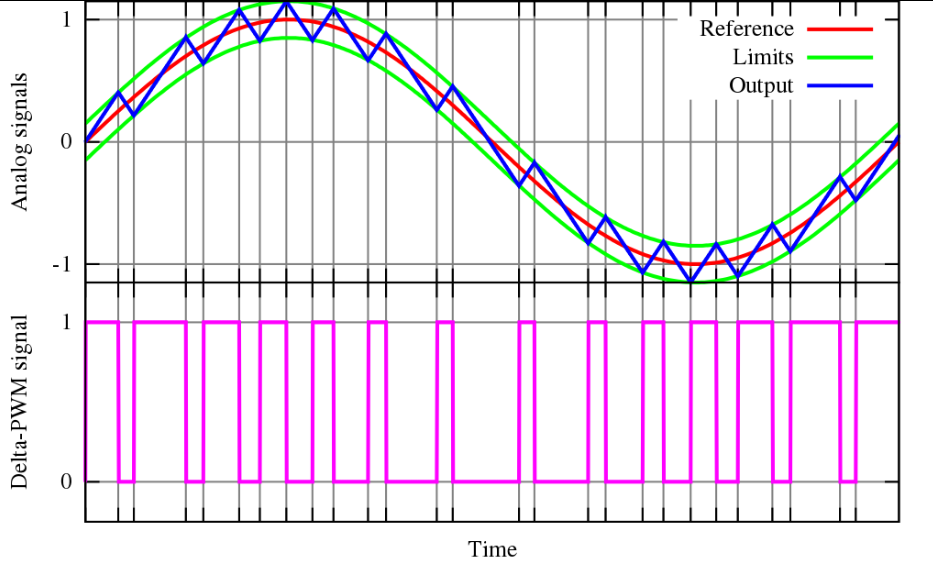
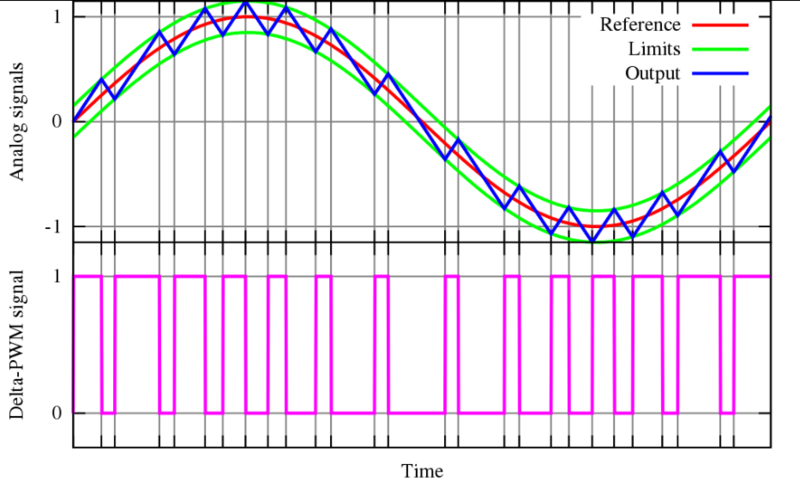
Principle of the delta Pulse Width Modulation (PWM).
Created using maxima code: freq : 0.05; /* frequency of the reference signal */ hysteresis : 0.15; /* hysteresis of the delta pwm */ currentStep : 0.5; /* rate of increase (or decrease) in the output current */ RefSinSignal(t) := sin(2*%pi*freq*t); UpSineSignal(t) := RefSinSignal(t) + hysteresis; LoSineSignal(t) := RefSinSignal(t) - hysteresis; stepSize : 1e-2; /* step size for calculations */ stepLim : ceiling(1/(freq*stepSize)); /* final step */ myX : makelist(k*stepSize,k,0,stepLim)$ /* X axis points of evaluation */ increasing : 1; /* flag to identify if the current is increasing or decreasing */ currentY : [0]$ /* current signal (input to modulate) */ deltaSignal : [0]$ /* the delta-PWM signal (modulated) */ crossing : [0]$ /* rising and falling times of the PWM signal */ for j:1 thru stepLim do /* create the current waveform and its delta-PWM */
block(
if(increasing=1)
then if(currentY[j]<=UpSineSignal(j*stepSize)) /* if current is increasing and below upper limit */
then block(
currentY : append(currentY,[currentY[j]+(currentStep*stepSize)]),
deltaSignal : append(deltaSignal,[1]))
else block(
currentY : append(currentY,[currentY[j]-(currentStep*stepSize)]),
deltaSignal : append(deltaSignal,[0]),
crossing : append(crossing,[myX[j]]),
increasing : 0)
else
if(currentY[j]>=LoSineSignal(j*stepSize)) /* if current is decreasing and above lower limit */
then block(
currentY : append(currentY,[currentY[j]-(currentStep*stepSize)]),
deltaSignal : append(deltaSignal,[0]))
else block(
currentY : append(currentY,[currentY[j]+(currentStep*stepSize)]),
deltaSignal : append(deltaSignal,[1]),
crossing : append(crossing,[myX[j]]),
increasing : 1)
);
crossing : setify(crossing)$ /* convert list to set */
/* Plot them */
load(draw); topPlot : gr2d(points_joined=true,point_type=dot,
line_width=2,ytics={-1,0,1},font="Times",
ylabel="Analog signals",font_size=15,
color=red,key="Reference",explicit(RefSinSignal(x),x,0,20),
color=green,key="Limits",explicit(UpSineSignal(x),x,0,20),
key="",explicit(LoSineSignal(x),x,0,20),
color=blue,key="Output",points(myX,currentY),
xtics=crossing,grid=true,
user_preamble="set format x ""; set tmargin 0;
set bmargin 0; set xlabel "" 0,1.5",
title=""
)$ lowPlot : gr2d(points_joined=true,point_type=dot,
line_width=2,ytics={0,1},font="Times",title="",
ylabel="Delta-PWM signal",xlabel="Time",
color=magenta,points(myX,deltaSignal),
xtics=crossing,grid=true,yrange=[-.25,1.25],
user_preamble="set format x ""; set tmargin 0;
set bmargin 1.5"
)$ draw(terminal=svg,file_name="Delta PWM",
topPlot,lowPlot);
Author Delta_PWM.png: Cyril BUTTAY derivative work: Krishnavedala (talk)
Licensing
| This work is licensed under the Creative Commons Attribution-ShareAlike 2.5 License. |
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 13:59, 30 August 2023 | | 933 × 562 (116 KB) | Isidore (talk | contribs) | Principle of the delta Pulse Width Modulation (PWM). Created using maxima code: freq : 0.05; →frequency of the reference signal: hysteresis : 0.15; →hysteresis of the delta pwm: currentStep : 0.5; →rate of increase (or decrease) in the output current: RefSinSignal(t) := sin(2*%pi*freq*t); UpSineSignal(t) := RefSinSignal(t) + hysteresis; LoSineSignal(t) := RefSinSignal(t) - hysteresis; stepSize : 1e-2; →step size for calculations: stepLim : ceiling(1/(freq*stepSize... |
{kind=link}
{kind=link}
_in_the_output_current){kind=link}
{kind=link}
You cannot overwrite this file.
File usage
The following page uses this file:
{kind=link}